


陀螺罗经【百科】


陀螺罗经【百科】
定义
1、用陀螺为敏感元件指示真北的仪表。
2、利用陀螺特性,能自动找北并能跟踪地理子午面的航海仪器。
简介

电罗经
陀螺罗经又称电罗经,是利用陀螺仪的定轴性和进动性,结合地球自转矢量和重力矢量,用控制设备和阻尼设备制成以提供真北基准的仪器。按对陀螺施加作用力矩的方式可分为机械摆式与电磁控制式两类陀螺罗经:机械摆式陀螺罗经按产生摆性力矩方式分为用弹性支承的单转子上重式液体连通器式罗经和将陀螺仪重心放在支承中心以下的下重式罗经;电磁控制式陀螺罗经是在两自由度平衡陀螺仪的结构上,设置电磁摆和力矩器组成的电磁控制装置,通过电信号给陀螺施加控制力矩。
陀螺罗经是一种以陀螺仪为核心元件,指示船舶航向的导航设备。它的功用与磁罗经相近,但其精度更高,而且不受地球磁场和铁磁物质的影响,故更适应于现代化船舶的要求,是目前船舶指示航向基准的主要设备。
陀螺罗经是根据法国学者L.傅科1852年提出的利用陀螺仪作为指向仪器的原理而制造的。德国人安许茨于1908年,美国人E.A.斯佩里于1911年,英国人S.G.布朗于1916年分别制成以他们的姓氏命名的3种不同的陀螺罗经,布朗罗经以后又发展为阿马-布朗罗经。现在这3种罗经都各自形成产品系列。
发展
长期以来,磁罗经作为测定船舶方位用的的指向仪器,在各类船舶上得到广泛应用。然而随着航海事业和造船技术的发展,钢船代替了了木船,特别是大中型船舶和潜水艇的出现,磁罗经的可靠性和精确度远不能满足要求,这就促使人们寻求新的指向仪器,不久陀螺罗经问世了。
世界上第一台由安许茨制造的陀螺罗经
自从第一台陀螺罗经出现以来,它在品种、数量、工作特性和工艺技术等方面都有迅速的提高和发展。今天,陀螺罗经作为一种能够准确寻找地理北向的导航仪器,已被广泛地应用在舰船上,成为海上导航的主要仪器,并被视为现代惯性导航的先驱。陀螺罗经历史悠久、饱经沧桑。那么,世界上第一台陀螺罗经究竟何时何地诞生的呢?
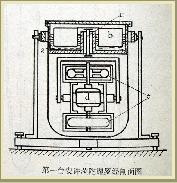
1852在巴黎召开的“关于叙述地球运转运动的实验”的学术报告会上,法国的利昂·傅科指出:“轴保持于水平平面内的陀螺,力求在自转的地球上使其轴与子午线同步转动。”这一论述后来被称为傅科定理,它奠定了陀螺罗经研制的基本理论基础。在这个基础上,傅科在法国的亚眠和兰斯等地成功地进行了一系列实验。其中一个实验,用二个平衡环来支撑陀螺,使陀螺旋转轴在水平面内能无摩擦地运动。再利用适当的阻尼,使得旋转轴能稳定在地球旋转矢量的水平分量上,即稳定在真北方向上。当时由于受到技术水平和技术设备的限制,傅科没有得到一个长时间高速旋转的陀螺罗经,因而没能获得高的精度。但是,这个实验装置实际上已经是陀螺罗经的雏型,也可说是世界上最早的陀螺罗经。到了二十世纪初叶,德国发明家海尔曼·安许茨凯姆弗制造出了世界上第一台能用于舰船导航的陀螺罗经。开创了陀螺罗经发展史上的新里程。安许茨是一位兴趣广泛、学识渊博的人。他最初研究医学、继而研究美术史,以后又立志于探险,他决心考察北极。为了能在极地附近进行精确的测量,他产生了乘坐潜艇从水下潜到极地去的大胆设想。但因为当时潜艇里用的磁罗经受地磁场影响,在接近北极的地区是不能测出航向的。为了解决这个棘手的问题,安许茨决心搞一个不受地磁场影响的新型指向仪器。为此,他返回了自己的故乡慕尼黑,以充沛的精力和全部私蓄投入了陀螺罗经的研制工作。起初,他搞了一个方位陀螺,但由于方位陀螺有漂移,必须经常地进行重新调整,因而不适于在船上作较长时间的指向。这就促使安许茨改而研制找北仪器。经过三年艰苦的奋斗,在一九0四年安许茨成功地制造了一台陀螺罗经。其结构如图所示,在水а里浮着的浮筒ь安装在垂直轴с上,支撑了整个陀螺仪。在直流电机D的两个轴端上各装有一个作为陀螺的飞轮е(为了能画出陀螺的剖面,陀螺轴画成了铅垂的。实际使用时,陀螺轴是处于水平的)。这就是安许茨的第一台陀螺罗经。
法国物理学家列昂.福科(Leon Foucault) 1852年提出的陀螺指向理论;
现代船舶上普遍使用的陀螺罗经于本世纪初研制成功的船舶指向仪器。
1908年德国生产出了安许茨型陀螺罗经(ANSCHÜTZ gyrocompass);
1911年美国生产出了斯伯利型陀螺罗经(SPERRY gyrocompass);
1916年英国生产出了勃朗型陀螺罗经(BROWN gyrocompass)。
概述
电罗经是根据陀螺原理制成的,根据陀螺在不受外力的作用下,保持空间指向不变的原理,制作成电罗经,电罗经的标准学名是陀螺罗经,只不过用电,大家就叫它电罗经。陀螺罗经在启动的时候,其指针指北,之后便一直指北,如果偏离指北,在重力的作用下,自动修正指北。
根据陀螺马达数量及支撑马达的系统分为三大系列。分别是安修斯、斯伯列、阿芒.勃朗。一个陀螺马达及液体支撑马达的是安修斯,两个陀螺马达(马达轴向成直角)及液体支撑马达的是斯伯列,一个马达及没有液体支撑的是阿芒.勃朗。不管什么牌子、什么型号,基本上是参照这三个系列来制造。电罗经不受磁场的影响,但只能在南北纬70度以内使用,南北两极就不能使用。
其主要设备有主罗经(mast gyro)、分罗经(repeater)、控制箱(control unit)以及航向记录仪(course recorder)组成。由于船舶电罗经和自动舵基本都是配套由同一个厂家提供,主罗经的安放位置一般有如下几种方式。
A. 内置式:主罗经合成在自动舵内。控制箱可以拆分后同样安装在自动舵内主罗经两侧,或者安装在驾驶室后壁。
B. 放在专门罗经房:主罗经放在专用罗经房内。罗经房一般在驾驶台同层或者下一层居多。
C. 分离式:主罗经放置在报房或者驾控台内部(一般这种情况,大多数自动舵也为分离式)。
目前常见的电罗经产品
1.日本产Yokogawa cmz-xxx x系列(xxx表数字,如500,700,后一个x表类别,s 表单套,d表双套)。陀螺球浮于专用液体中。液体由苯甲酸、甘油、蒸馏水按照3.2g :145ml:1.6l比例混合。
2.日本产Tokimec TG-XXXX x系列(x表意同前)。干球,无液体。
3.德国产Retheon anschtuz std-xx(x表意同前)系列。陀螺球浮于专用液体中。
4.其他,如C-plath,sperry等产品相对来说用的和见的都比较少。
构成
陀螺罗经通常由主罗经和附属仪器两部分组成。附属仪器包括电源变换器、控制箱或操纵箱和分罗经等,是确保主罗经正常工作的必需设备。为了减少陀螺罗经的部件数,电源变换器可与控制箱组装,也可与主罗经组装成一体。主罗经一般可带8~20个分罗经,用以复示主罗经的航向。现代陀螺罗经向着尺寸小、重量轻、使用寿命长、维修方便、操作简便并能适用于大、中、小型船舶的趋势发展。例如以逆变器代替变流机,以固态元件代替电子管,以无接触式发送器代替接触式发送器等。新型陀螺罗经的灵敏部分一般都制成密封球形,并用特制的液体支承以提高其精度和可靠性。
类型
近百年,生产出了近百种型号的陀螺罗经,主要分为三大系列或两大类型。
按照结构特点和工作原理分为三大系列:即安许茨系列;斯伯利系列;阿玛-勃朗系列。
按照灵敏部分转子个数分为两大类型:即单转子陀螺罗经和双转子陀螺罗经。
按照控制力矩的性质分为两大类型:机械摆式陀螺罗经和电磁控制式陀螺罗经。
按照阻尼方式分两大类型:水平轴阻尼陀螺罗经和垂直轴阻尼陀螺罗经。
种类
陀螺罗经按照对陀螺施加作用力矩的方式可分为机械摆式和电磁控制式两类。
1、机械摆式陀螺罗经
按产生摆性力矩的方式可分为两种。一种是用弹性支承的单转子上重式水银器罗经,或称液体连通器式罗,如斯佩里型陀螺罗经;另一种是将陀螺仪重心置于支承中心之下,称为下重式罗经,如安许茨型用液浮支承的双转子下重式罗经。
这两种方式产生的摆性力矩方向相反,它们的动量矩矢量的方向也相反。液体连通器式罗经的动量矩矢量指南,下重式罗经的动量矩矢量指北。在摆性力矩的作用下,机械摆式罗经的主轴北端会绕子午面作等幅摆动,其轨迹为一球面上的椭圆。加装阻尼器的机械摆式罗经,主轴北端则以阻尼摆动形式趋于子午面并相对于子午面稳定,从而提供真北基准。
液体连通器式罗经的灵敏部分由陀螺马达和托架组成,采用钢丝悬吊,利用水银器的负摆效应产生控制力矩。下重式罗经的灵敏部分系一密封陀螺球,球内装有两个参数相同的陀螺马达、灯形支架和阻尼器等构件。两个陀螺马达垂直地支承在灯形支架上,用曲柄连杆和弹簧互相连接,并分别与陀螺球主轴南北线成45°夹角。借助这种装置,两个陀螺马达只能同时绕其垂直轴作相反方向、相同角度的转动,但转角很小。因此,它们合成动量矩矢量始终与陀螺球主轴南北线一致,类似单转子作用,用两个陀螺马达可以有效地消减摇摆误差。
2、电磁控制式陀螺罗经
在两自由度平衡陀螺仪的结构上设置一套由电磁摆和力矩器组成的电磁控制装置,通过电信号给陀螺施加控制力矩的陀螺罗经,简称电控式罗经。因电信号易于控制,故可按需要改变控制力矩的大小而实现罗经快速稳定。阿马-布朗型罗经为典型电磁控制式罗经。中国造CLP-1型罗经是民用船舶使用的电磁控制式陀螺罗经。
机械摆式罗经和电控式罗经中的陀螺装置最常见的为滚珠陀螺和液浮陀螺。液浮陀螺出现以后,又发展出挠性陀螺。它的支承系统不用传统的陀螺框架轴承而用挠性接头。挠性陀螺具有结构简单,体积小、重量轻、寿命长,可靠性高等优点,已在船舶上应用。挠性陀螺罗经就其原理来说仍然属于电控式罗经。
误差
陀螺罗经存在纬度误差、速度误差、冲击误差、摇摆误差和基线误差等。采用垂直轴阻尼法的陀螺罗经都有纬度误差,这是一种原理误差。速度误差同罗经结构参数无关,而同船舶的航速、航向和所在地纬度有关。纬度误差和速度误差都是有规律的,可用查表法、移动基线或刻度盘法、力矩补偿法等予以修正。船舶机动航行时因惯性力对陀螺罗经的影响而引起的冲击误差,可用切断阻尼器并使罗经的等幅摆动周期等于84.4分钟或切断电磁摆的方法予以消除。
陀螺罗经均有消减因船舶摇摆引起摇摆误差的装置,所以这种误差一般可不予考虑。
由于主罗经或分罗经的基线安装不善而造成的基线误差是一种固定误差,测定后可转动主罗经或分罗经底座使基线与船首尾线平行来校正。在平静海面上,船舶恒速恒向航行时,修正后的陀螺罗经的误差应不大于1°。
优缺点
相比磁罗经,电罗经具有精度高,误差小等优点。尤其和配合自动夺使用自动操舵功能后,可大大节省驾驶员的时间和精力。由于现在电罗经都可接入磁罗经信号,从而可以实现磁罗经操舵。虽然可能误差和精度有差于电罗经。
与磁罗经相比较,陀螺罗经的主要优缺点:
主要优点:指向精度高;多个复示器,有利于船舶自动化;不受磁干扰影响,指向误差小;安装位置不受限制等。
主要缺点:必须有电源才能工作(可靠性较差);工作原理、结构复杂。
电罗经配备要求
主电罗经装驾驶室,两翼一般配两个方位罗经分显。驾驶室的是航向分显。如果可能会在舵机室再安一个分显。也有船舶配备两个电罗经的,一个置于驾控台内,一个布置在电气设备间。
光纤陀螺罗经及其发展和应用
20世纪70年代,伴随着光纤通信技术的发展,光纤传感技术也迅速发展起来。该技术是以光波为载体,光纤为媒质,感应和传输外界被测量信号的新型传感技术,以独特的优良性能赢得极大的重视,并在各个领域中广泛应用。光纤陀螺技术是光纤传感技术的一个特例,是利用光学传输特性而非转动部件来感应角速率和角偏差的惯性传感技术。
1、光纤陀螺的结构
按照元器件类型,光纤陀螺分为分立元件型、集成光学型和全光纤型。由于分立元件型光纤陀螺存在体积较大、可靠性较差、误差较大等缺点,现在世界各国都已停止发展。集成光学型光纤陀螺将主要光学元件如耦合器、偏振器、调制器都集成在一块芯片上,将光纤线圈、光源、检测器接在芯片适当的位置,就构成了实用的集成光学型光纤陀螺。从光纤陀螺的发展方向来看,集成光学型光纤陀螺是最有发展前途的光纤陀螺形式。全光纤陀螺是将主要的光学元件都加工在一条保偏光纤上,从而可以避免因元器件连接造成的误差。目前,全光纤陀螺技术比较成熟,其性能在三种中最好,适合在现阶段研制实用的商品光纤陀螺。
根据干涉型光纤陀螺的信号检测方式的不同,可以分为开环式和闭环式两大类。开环式光纤陀螺直接检测干涉条纹的相移,因而动态范围较窄,检测精度较低。闭环式系统采取相位补偿的方法,实时抵消萨格奈克相移,使陀螺始终工作在零相移状态,通过检测补偿相位移来测量角速度,其动态范围大,检测精度高。此外,闭环式光纤陀螺对环境尤其是对振动不敏感,是研制高精度光纤陀螺仪的理想形式。开环式全光纤陀螺是中低精度、低成本光纤陀螺中比较流行的结构。目前,在中高精度光纤陀螺仪领域,最为流行的设计结构为全数字闭环式光纤陀螺仪。
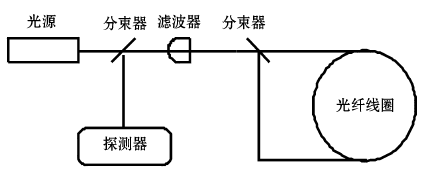
光纤陀螺示意图
2、光纤陀螺的特点
光纤陀螺的主要特点是:①无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感;②结构简单,零部件少,价格低廉;③启动时间短(原理上可瞬间启动);④检测灵敏度和分辨率极高;⑤可直接用数字输出并与计算机接口联网;⑥动态范围极宽;⑦寿命长,信号稳定可靠;⑧易于采用集成光路技术;⑨克服了因激光陀螺闭锁现象带来的负效应;⑩可与环形激光陀螺一起集成捷联式惯性系统传感器。由于光纤陀螺的上述突出优点,使其在许多领域中得到广泛的应用。
3、光纤陀螺罗经的发展
1976年美国犹他大学Vali和Shorthill首先提出光纤陀螺的设想并进行了演示试验。1978年美国麦道公司研制出第一个实用化光纤陀螺,1983年又研制出零相位检测的光纤陀螺。1980年Ulrich揭示了解决光纤陀螺上互易性的重要性,Culter揭示了相干的Rayleigh反向散射是光纤陀螺灵敏度提高的主要障碍之一,并提出了一些解决的方法。同年Bergh等研制出第一台全光纤陀螺试验样机,使光纤陀螺向实用化迈进了一大步。1981年Ezekiel等证明了Kerr效应影响光纤陀螺的短期漂移误差。1982年Bergh等指出,采用超发光二极管(SLD)可以大大降低Kerr效应带来的误差,并研制出克服Kerr效应的光纤陀螺。1984年Arditty等演示了一个用多功能集成光学元件的光纤陀螺,证明了集成光纤陀螺的可行性。
20世纪80年代末至90年代初,光纤陀螺技术已达到实用化产品阶段,许多公司都推出了自己的相关产品。其中美国在这方面走在世界前列,已研制出实验室精度为10-4°/h的高精度光纤陀螺,霍尼韦尔(Honeywell)公司、利顿(Litton)公司、史密斯公司、道格拉斯公司及美国海军研究所等都推出了系列产品。Honeywell公司在90年代生产了9000只开环式全保偏光纤陀螺,用于民用航空,精度为1°/h。该公司已经制造出精度为0.000038°/h的干涉型光纤陀螺,可用于核潜艇的导航或空间飞行。Litton公司于20世纪90年代初建起一条战术级组合惯导系统的生产线,至2001年初已交付超过5000套的惯导系统。这表明光纤陀螺已超过15000个,这些产品供50个以上的不同用户使用。其产品LN-201零偏为1~10°/h,已用于AMRAAM空对空导弹。史密斯公司的光纤陀螺已成功地应用于各型军用飞机。道格拉斯公司研制出一种用于钻井设备的光纤陀螺,能承受很宽的湿度变化和强度冲击,这也是光纤陀螺首次用于钻井设备。美国海军研究所已研制出一种漂移为0.005°/h的全光纤陀螺,其惯导装置水平角速度的短期分辨率已达到5.3×107rad/s。日本是继美国之后光纤陀螺研究生产的大国。Mitsubishiprec公司、HitachiCable公司等都推出了自己的系列产品,特别是在中低精度光纤陀螺方面,这些公司走在世界前列。JAE公司进行了光纤陀螺在多个领域的应用研究,如陆海空及空间运动平台的导航,火箭的姿态控制,其中1991年发射的TR-IA型全重力实验火箭是世界上首次采用光纤陀螺的实例。自从光纤陀螺诞生以来,在近30年的时间里,其发展是日新月异。不仅科学家热衷于此,许多大公司出于对其市场前景的看好,也纷纷加入到研究开发的行列中来。由于光纤陀螺在机动载体和军事领域的应用甚为理想,因此各国的军方都投入了巨大的财力和精力。目前一些发达国家如美、日、德、法、意、俄等在光纤陀螺的研究方面均取得了较大进步,一些中低精度的陀螺已经实现了产品化,而少数高精度产品也开始在军方进行装备调试。
美国在光纤陀螺的研究方面一直保持领先地位,目前已经有多种型号的光纤陀螺在美国投入使用。以斯坦福大学和麻省理工学院为代表的科研机构在研究领域中不断取得突破,而几家研制光纤陀螺的公司在陀螺研制和产品化方面也做得十分出色,最著名的Litton公司和Honeywell公司代表了国际上光纤陀螺的最高水平。日本紧随美国之后,在中低精度陀螺实用化方面走在了世界前列。许多公司都开始批量生产多种中低精度的光纤陀螺。西欧几个国家以及俄罗斯的第一代光纤陀螺也已经投入生产,少数中、高精度陀螺已经装备到空军、海军及导弹部队中。相对而言,中国光纤陀螺的研究起步较晚,但是在广大科研工作者的努力下,已经逐步拉近了与发达国家间的差距。航天工业总公司、上海10所、清华大学、浙江大学、北方交通大学、北京航天航空大学等单位相继开展了光纤陀螺的研究。根据目前掌握的信息看,国内的光纤陀螺研制精度已经达到了惯导系统的中低精度要求,有些技术甚至达到了国外同类产品的水平。但是国内的研究大多停留在实验室阶段,没有形成产品,距离应用还有差距。所以我们在这方面仍然有很长的路要走。
4、光纤陀螺罗经的应用前景
经过30多年的研究和开发,中低精度的光纤陀螺仪在国外已批量生产,高精度光纤陀螺仪已达到0.00038°/h的水平。国外已从地下探测到地面车辆定位定向,从舰载、机载到航天惯导系统都已广泛应用光纤陀螺仪。在中高精度姿态方位参考系统(AHRS)和捷联式惯导系统(SINS)中,光纤陀螺仪和激光陀螺仪占有重要位置。随着光纤通信技术和光纤传感技术的发展,许多惯性技术专家预言,传统的机电式陀螺仪将在21世纪初期被激光陀螺仪所取代,光纤陀螺仪又将取代激光陀螺仪。30多年来,世界各发达国家的科研机构和著名大学都投入了很多的经费研究这个有发展前途的新型光纤旋转速率传感器。随着光纤通信技术和光纤传感技术的发展,光纤陀螺仪已经实现了惯性器件的突破性进展。惯性技术专家现已公认,光纤陀螺仪(干涉型)是用于惯性制导和导航的关键技术。美国国防部在20世纪90年代初提出,光纤陀螺仪的精度1996年要达到0.01°/h, 2001年要达到0.001°/h,2006年要达到0.0001°/h,有取代传统的机电式陀螺仪的趋势。目前,利顿公司的0.1°/h的光纤陀螺仪已用于战术导弹的惯导系统,并且已批量生产采用光纤陀螺仪的姿态航向参考系统(AHRS)。Honeywell公司已经生产出用于波音777飞机和道尼尔飞机上的光纤陀螺仪,研制的高精度陀螺仪的零偏稳定性已达到0.00038°/h。精度为1~0.01°/h的工程样机已用于飞行器、惯性测量组合装置。新型导航系统FNA 2012采用了精度为1°/h的光纤陀螺仪和卫星导航GPS。发展至今,光纤陀螺的实际应用研究(特别是航天航空及工业领域)主要集中于运用光电集成芯片、微光电机械、信号处理等技术来降低光纤陀螺成本,且实现小型化、高性能等方面,对I-FOG引入了消偏结构、三轴结构及EDF掺饵光纤和ASE自发辐射光源,以进行光纤陀螺的标准化及光纤型激光陀螺的研制。
现在,光纤陀螺的大部分关键技术问题已经得到很好的解决,灵敏度、动态范围、标度因素等技术指标也得到很大的改善。关键技术问题的解决和光纤陀螺独有优势有力地推动了光纤陀螺的产业化。如今,全球每年生产的光纤陀螺仪已达到十万个,广泛应用于航天航空、机航和矿物勘采,以及航海和地震探测等技术领域。
日本航空电子公司生产的光纤陀螺仪已用于遥控直升机、足球场用的剪草机和清洁林荫道地面的机器人。三菱公司生产的几种型号的光纤陀螺仪已用于发射运载器,并且已计划用于飞向月球的运载火箭。日立公司现在每月生产3000台光纤陀螺仪,供应汽车定位定向系统。如每月生产100万台,成本将降低到每台100美元。随着光纤陀螺仪的迅速发展,选用温度特性好的光纤传感器件,进行光纤陀螺仪的温度试验和温度补偿措施,并采用三轴数字闭环技术等光纤陀螺仪工程化的关键技术,以及探索谐振腔式光纤陀螺仪的试验研究,将加快光纤陀螺仪的研究工作,从而根据各领域对精度的不同要求,研制出相应的光纤陀螺仪。
光纤陀螺仪最大的优点是不需要在石英块或其它材料中精密地加工光学回路,制造成本低,而且可根据使用要求,实现高、中、低不同精度的产品,因此,光纤陀螺具有更广阔的应用领域。如战术导弹、制导炸弹(炮弹)等只有几分钟甚至几秒钟的飞行时间,对陀螺仪的精度要求不是很高,但对陀螺的尺寸大小及抗冲击性能有较高要求,又是一次性使用,因而要求陀螺仪的成本应尽可能降低,且能大批量生产。因此,光纤陀螺是非常理想的选择。
国外主要光纤陀螺开发商正在开发3种不同等级的光纤陀螺,这些光纤陀螺几乎覆盖了陀螺的所有应用领域。这3种类型包括用作低性能速率传感器的低精度陀螺(零偏误差为10~100°/h,标度因数误差为500×10-6~5000×10-6),用作如航海等中低精度航姿系统、战术导弹等平台的中精度陀螺(零偏误差为0.1 ~1°/h,标度因数误差为30×10-6~300×10-6)以及用作高精度惯导系统的高精度陀螺(零偏误差为0.001 ~0.01°/h,标度因数误差为1×10-6~5×10-6)。所有这些光纤陀螺基本上采用了相同类型的元器件,而仅仅在元器件的性能质量和装配公差上有所不同,因而很容易实现产品的系列化,满足不同领域不同系统的要求。随着光纤陀螺技术的不断成熟,其应用领域不断扩展,已经或正在不断地替换着传统机械式的陀螺。甚至有专家预言:“光纤陀螺出现,机械陀螺停转。”
5、光纤陀螺罗经在航海上的应用
在海上,船舶一直是将陀螺罗经作为航向信息源,陀螺仪是惯性元件之一。陀螺仪能感应导航基准坐标系相对惯性坐标系的角偏差,并将这个信号提供给导航、定位等系统,可应用于卫星定位仪、ARPA、组合导航系统和AIS等等。由于高速旋转的“转子”质量不平衡,各转动自由度的交叉耦合效应、转子转动惯量,转子支撑的有害力矩等因素严重影响陀螺精度的提高,而且陀螺罗经启动时间较长。但光纤陀螺罗经就不受这方面的影响,除了提供高精度的航向信息外,还能提供纵、横摇和船舶回转角速度的信息,即航行中船舶的瞬时姿态信息源,几乎不需要启动时间,因此,在航海上会得到广泛的应用。具体体现在以下几个方面:
(1)进一步推动船舶驾驶自动化发展。船舶驾驶自动化的实质是信息处理及安全航行决策等的自动化。随着技术不断发展和成本的不断降低,光纤陀螺罗经必将成为高可靠性和高精度的船舶动态数据源,为船舶驾驶自动化信息处理平台提供新的底层支持。
(2)可提供船舶的姿态信息。提供船舶的纵横向倾角和船舶回转角,为船舶配载操纵提供更科学、准确的依据,提高船舶的安全性。
(3)磁罗经校差的新手段。磁罗经校验师可利用光纤陀螺罗经稳定时间短,不产生冲击误差、纬度误差、速度误差及便于携带等特点,在磁罗经自差校正中利用光纤陀螺罗经和磁罗经进行比对的方法,即方便,又高效。
(4)丰富船舶操纵理论及实践。可根据船舶在不同舵角下艏回转角速度的大小,及时了解船舶在不同装载的状态或风浪作用下的操纵性能。在狭水道等受限水域航行时,可根据航道宽度、船型等,设置船舶回转角速度的正常值范围及上限报警值,以及时可靠的数据来保证船舶操纵效果。
(5)可推动相关规则、规定等的修改和制定。在许多场合下,由于船舶缺少可靠的数据来源,在某些规则中无法作出定量的规定,往往用“海员通常做法”来描述。现在则可用光纤罗经提供的船舶姿态数据来界定。同样,在海事分析中,该数据记录也可作为判断事故责任方的重要依据之一,使规则和规定更具有操作性。

