



自动化集装码头引领港口新时代


中国海事服务网特约专家:王正旭 香港理工大学博士 研究方向港口物流规划
自动化集装箱码头是最新一代的集装箱码头,在自动化集装箱码头中,自动化机械代替传统手工操作机械进行集装箱的运输、装载和卸载。1993年ETC (Europe Container Terminals)公司在荷兰鹿特丹港建造了世界上第一个全自动化集装箱码头,在随后的20年时间里,包括澳大利亚,日本,韩国,德国,新加坡在内的许多国家,都开始建造自动化集装箱码头。近几年,我国也开始自主设计并建造自动化集装箱码头。2012年,厦门远海码头项目是我国首个自动化集装箱码头建设项目,该项目的启动填补了国内自动化集装箱码头的空白。
自动化集装箱码头采用自动化码头装卸系统,该系统可以帮助码头实现,低碳、环保、高效、可靠、安全的目标。根据装卸设备的不同,自动化集装箱码头可分为两类:一类是只采用自动跨车(automatic straddle carrier or automatic lifting vehicle (ALV))来装卸载及运输集装箱;另一类是采用自动无人搬运车(automatic guided vehicle (AGV))来运输集装箱,采用无人龙门吊(automatic gantry crane(AGC))来装卸载集装箱。前一类自动化集装箱码头因为堆场占地面积大,不适合土地价格昂贵的我国;本文讨论较为适合我国国情的由AGV和AGC运输及装卸集装箱的自动化集装箱码头系统。
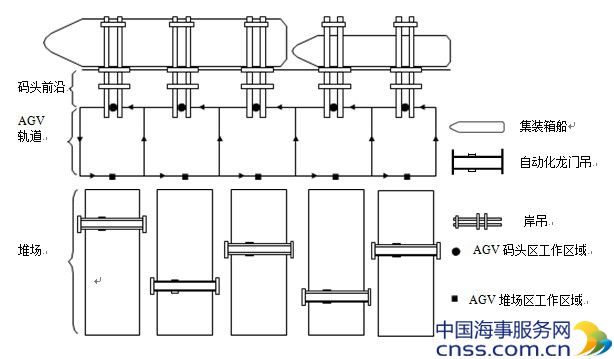
图1 自动化集装箱码头的布局图
图1所示是一个自动化集装箱码头的布局图,目前为止AGV只可以行驶在堆场和岸吊之间的区域,并且只能行驶在给定的轨道上;再者由于AGV是自动驾驶,不需要人工干预,所以AGV的路径优化不同于传统车辆的路径优化问题主要体现在如下几个方面:
(1)避让措施
AGV避让措施的研究,是近年研究的热点问题。AGV避让措施是指避免车辆出现相互等待的死锁情况,比如AGV从不同路段同时到达交叉点的避让策略、AGV在同一路段的超车策略、AGV的停靠策略。
(2)调度规则
早期的学术研究更关注一台AGV只能分配给一个岸吊的调度策略,而现代学术研究表明,一台AGV可以分配给多个岸吊的策略可以提高岸吊的生产效率,减少AGV的等待时间,所以,在实际生产中,往往采取这种调度策略。但是,计算这种策略最优解的问题往往是NP-hard问题,所以如何实时计算AGV最优路径一直是学术研究的热点问题。
(3)安全距离
AGV是无人驾驶的车辆,在同一路段前后两台相邻的AGV必须保持一定的安全距离以防止特殊情况的发生,例如前面的AGV突然停止或者紧急停车,后面的AGV可以在安全距离内由行驶到静止。
(4)车辆数量
不同于传统集装箱卡车,AGV只能按照固定的轨道行驶,改变AGV的数量,就会改变所有AGV的最佳路径。而且,过多的AGV会造成交通拥堵和死锁,过少的AGV会降低码头的生产效率,如何在保证码头生产效率的情况下减少AGV的数量,也是自动化集装箱码头需要解决的问题。
我国集装箱运输行业发展迅猛,港口码头的集装箱吞吐量也在持续增加,2012年我国规模以上港口完成集装箱吞吐量超过17651万标准型,我国需要建设大型的、高效的、环保的、智能的自动化集装箱码头以满足行业发展的需要。因此,对自动化集装箱码头管理与优化的研究将为我国建设大型、新型集装箱码头提供理论与技术支撑,促进我国集装箱运输业的快速发展。
CNSS独家原创文章,转载请注明出处,否则将追究法律责任!

